
Таркиб
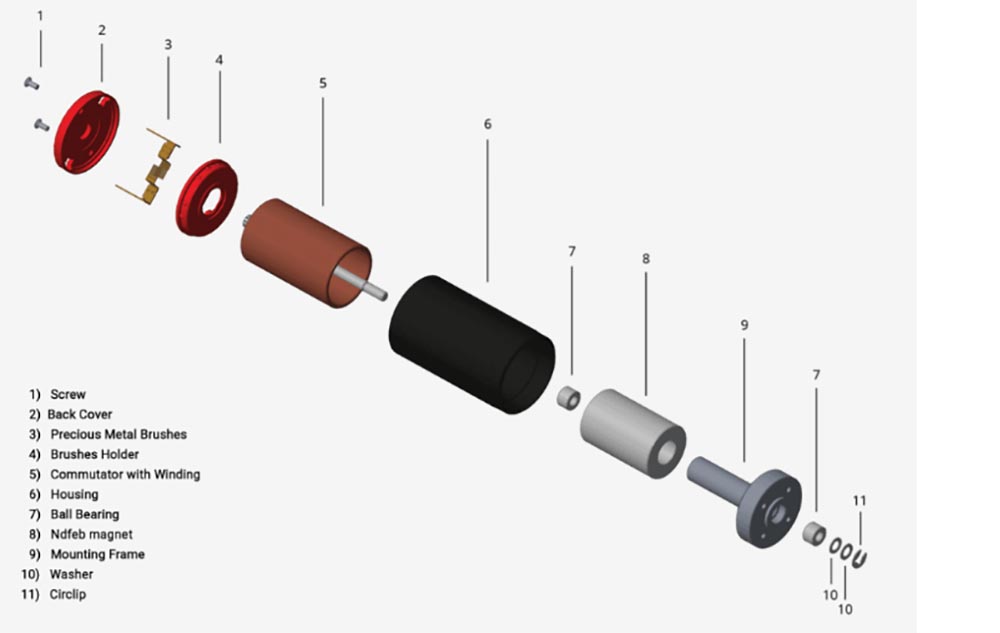
1. Муҳаррики доимии магнитии DC:
Он аз сутунҳои статор, роторҳо, хасуҳо, корпусҳо ва ғайра иборат аст.
Қутбҳои статор аз магнитҳои доимӣ (пӯлоди магнитии доимӣ), аз феррит, алнико, борони оҳани неодимӣ ва дигар маводҳо сохта шудаанд. Мувофиқи шакли сохтории худ, онро ба якчанд намуд, ба монанди навъи силиндрӣ ва навъи сафолӣ тақсим кардан мумкин аст.
Ротор одатан аз варақаҳои пӯлоди ламинатдори силикон сохта мешавад ва сими сирдор байни ду сӯрохии ҳастаи ротор печонида мешавад (дар се сӯрох се печ мавҷуд аст) ва пайвандҳо мутаносибан дар варақаҳои металлии коммутатор кафшер карда мешаванд.
Хасу қисми ноқилӣ буда, манбаи барқ ва печи роторро пайваст мекунад ва ду хусусияти ноқилӣ ва муқовимати фарсудашавӣ дорад. Хасуҳои муҳаррикҳои магнитии доимӣ аз варақаҳои металлии якҷинса ё хасуҳои графити металлӣ ва хасуҳои графити электрохимиявӣ истифода мебаранд.
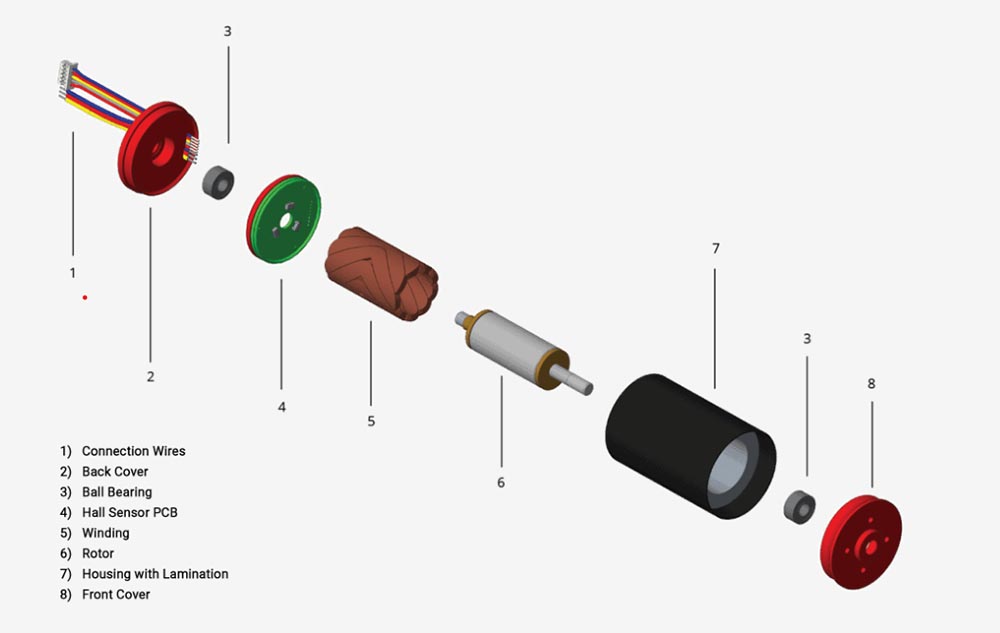
2. Муҳаррики ҷараёни доимии бе хасу:
Он аз ротори магнитии доимӣ, статори печи бисёрқутба, сенсори мавқеъ ва ғайра иборат аст. Мотор DC-и бечӯтка бо бечӯтка тавсиф мешавад ва барои амалӣ кардани коммутатсияи электронӣ аз дастгоҳҳои коммутатсияи нимноқил (масалан, унсурҳои Холл) истифода мебарад, яъне дастгоҳҳои коммутатсияи электронӣ барои иваз кардани коммутатсияҳои анъанавии контактӣ ва чӯткаҳо истифода мешаванд. Он дорои бартариҳои эътимоднокии баланд, набудани шарораи коммутатсия ва садои пасти механикӣ мебошад.
Сенсори мавқеъ ҷараёни печи статорро бо тартиби муайян мувофиқи тағйирёбии мавқеи ротор иваз мекунад (яъне мавқеи қутби магнитии роторро нисбат ба печи статор муайян мекунад ва дар мавқеи муайяншуда сигнали сенсории мавқеъро тавлид мекунад, ки аз ҷониби схемаи табдили сигнал коркард ва сипас хориҷ карда мешавад. Схемаи гузариши барқро идора кунед ва ҷараёни печро мувофиқи муносибати мантиқии муайян иваз кунед).

2. Муҳаррики ҷараёни доимии бе хасу:
Он аз ротори магнитии доимӣ, статори печи бисёрқутба, сенсори мавқеъ ва ғайра иборат аст. Мотор DC-и бечӯтка бо бечӯтка тавсиф мешавад ва барои амалӣ кардани коммутатсияи электронӣ аз дастгоҳҳои коммутатсияи нимноқил (масалан, унсурҳои Холл) истифода мебарад, яъне дастгоҳҳои коммутатсияи электронӣ барои иваз кардани коммутатсияҳои анъанавии контактӣ ва чӯткаҳо истифода мешаванд. Он дорои бартариҳои эътимоднокии баланд, набудани шарораи коммутатсия ва садои пасти механикӣ мебошад.
Сенсори мавқеъ ҷараёни печи статорро бо тартиби муайян мувофиқи тағйирёбии мавқеи ротор иваз мекунад (яъне мавқеи қутби магнитии роторро нисбат ба печи статор муайян мекунад ва дар мавқеи муайяншуда сигнали сенсории мавқеъро тавлид мекунад, ки аз ҷониби схемаи табдили сигнал коркард ва сипас хориҷ карда мешавад. Схемаи гузариши барқро идора кунед ва ҷараёни печро мувофиқи муносибати мантиқии муайян иваз кунед).
3. Мотор бо магнити доимии бе хасу бо суръати баланд:
Он аз ҳастаи статор, ротори пӯлоди магнитӣ, фишанги офтобӣ, муфтаи суръатбахш, корпуси марказӣ ва ғайра иборат аст. Барои чен кардани суръат сенсори Холлро дар сарпӯши муҳаррик насб кардан мумкин аст.
Муқоисаи муҳаррикҳои хасудор ва муҳаррикҳои бе хасудор
Тафовут дар принсипи электрификатсия байни муҳаррики хасудор ва муҳаррики бе хасудор: Муҳаррики хасудор ба таври механикӣ бо хасудори карбон ва коммутатор иваз карда мешавад. Муҳаррики бе хасудор ба таври электронӣ аз ҷониби контроллер дар асоси сигнали индуксия иваз карда мешавад.
Принсипи таъминоти барқ барои муҳаррики хасудор ва муҳаррики бе хасудор гуногун аст ва сохтори дохилии он низ фарқ мекунад. Барои муҳаррикҳои марказӣ, ҳолати баромади моменти муҳаррик (оё он аз ҷониби механизми кам кардани фишанг суст мешавад) фарқ мекунад ва сохтори механикии он низ фарқ мекунад.
муҳаррики DC-и беасоси хасушуда
муҳаррики DC-и беҳашамат ва беасос
Вақти нашр: 03 июни соли 2019