





BLDC-4560 ронандаи мотори бе хасу самараноки мотори доимии доимӣ барои қаторҳои моделӣ
Муқаддимаи маҳсулот
Муҳаррики DC бидуни чӯб як муҳаррики барқӣ мебошад, ки технологияи пешрафтаи электрониро барои рондани ротор тавассути контролери электронӣ бидуни истифодаи щеткаҳои карбон ва коммутаторҳои анъанавӣ истифода мебарад. Ин тарҳ имкон медиҳад, ки муҳаррикҳои доимии доимӣ самаранокии баландтар ва хароҷоти нигоҳдории камтар дошта бошанд. Дар муқоиса бо муҳаррикҳои анъанавии доимии чӯбдаст, муҳаррикҳои бечӯтка соиш ва фарсудашавиро коҳиш медиҳанд ва мӯҳлати хизмати муҳаррикро дароз мекунанд. Ҳамзамон, муҳаррикҳои мобайни XBD-4560 инчунин суръати вокуниши тезтар ва хусусиятҳои ҳамвортар доранд ва барои сенарияҳои барномае, ки устувории баланди корро талаб мекунанд, мувофиқанд.
Афзалият
Бартариҳои XBD-4560 Coreless Brushless Motor DC иборатанд аз:
Самаранокии 1.High: Дар муқоиса бо муҳаррикҳои хасу анъанавии, муҳаррикҳои DC brushless дорои самаранокии баландтар ва метавонад энергияи барқ ба энергияи механикӣ бо суръати баланд табдил.
Хароҷоти нигоҳдории пасти 2.Азбаски муҳаррикҳои бетараф щеткаҳои карбон ва коммутаторҳоро талаб намекунанд, онҳо хароҷоти нигоҳдории камтар ва мӯҳлати хизмати дароз доранд.
3.Зичии нерӯи баланд: Моторҳои Brushless метавонад қудрати бештари баромадро дар як ҳаҷм таъмин кунанд ва барои барномаҳое мувофиқанд, ки зичии баландтарро талаб мекунанд.
4.Суръати вокуниши баланд: Моторҳои Brushless суръати вокуниши тезтар доранд ва метавонанд ба танзими тезтар суръат ва вокуниши динамикӣ ноил шаванд.
Амали 5.Smooth: Моторҳои Brushless ҳамвортар кор мекунанд, ларзиш ва садоро коҳиш медиҳанд ва барои сенарияҳои барномае, ки устувории баланди корро талаб мекунанд, мувофиқанд.
Ариза
Моторҳои бидуни ядрои Синдбод дорои доираи васеи барномаҳо ба монанди роботҳо, дронҳо, таҷҳизоти тиббӣ, автомобилҳо, иттилоот ва коммуникатсия, асбобҳои барқӣ, таҷҳизоти зебоӣ, асбобҳои дақиқ ва саноати ҳарбӣ мебошанд.










Параметр
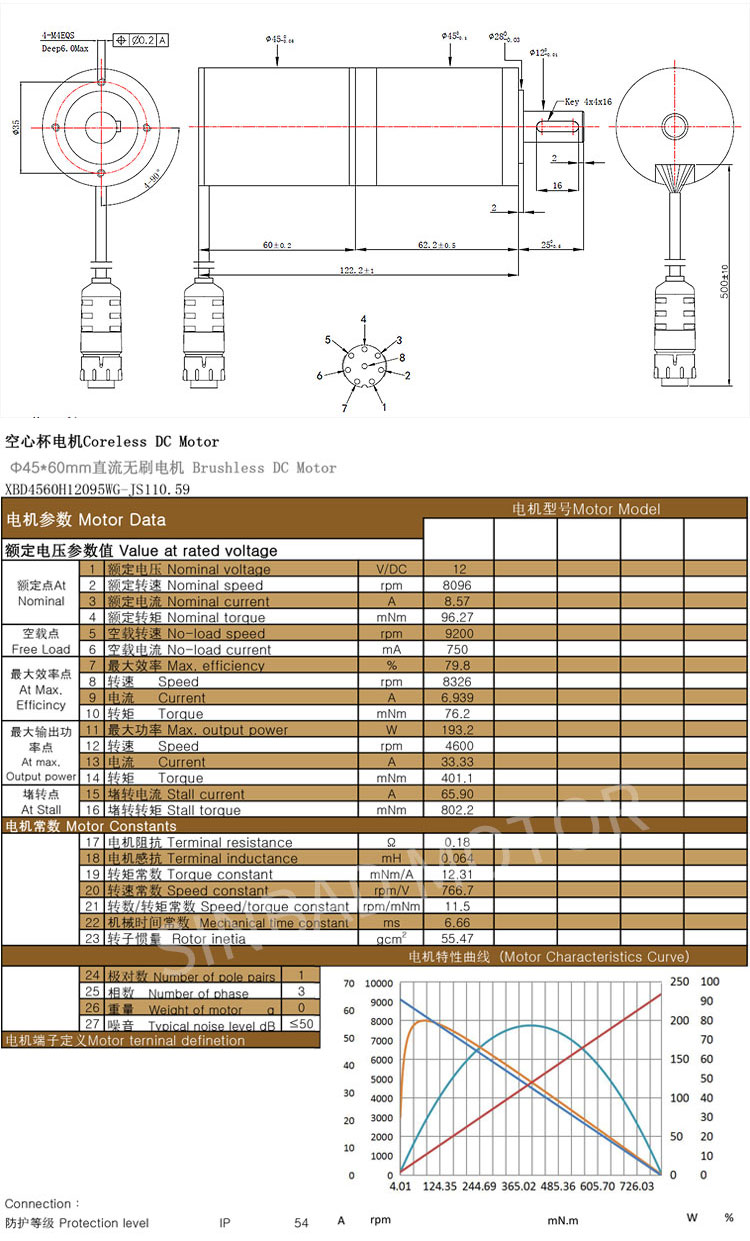
Намунаҳо

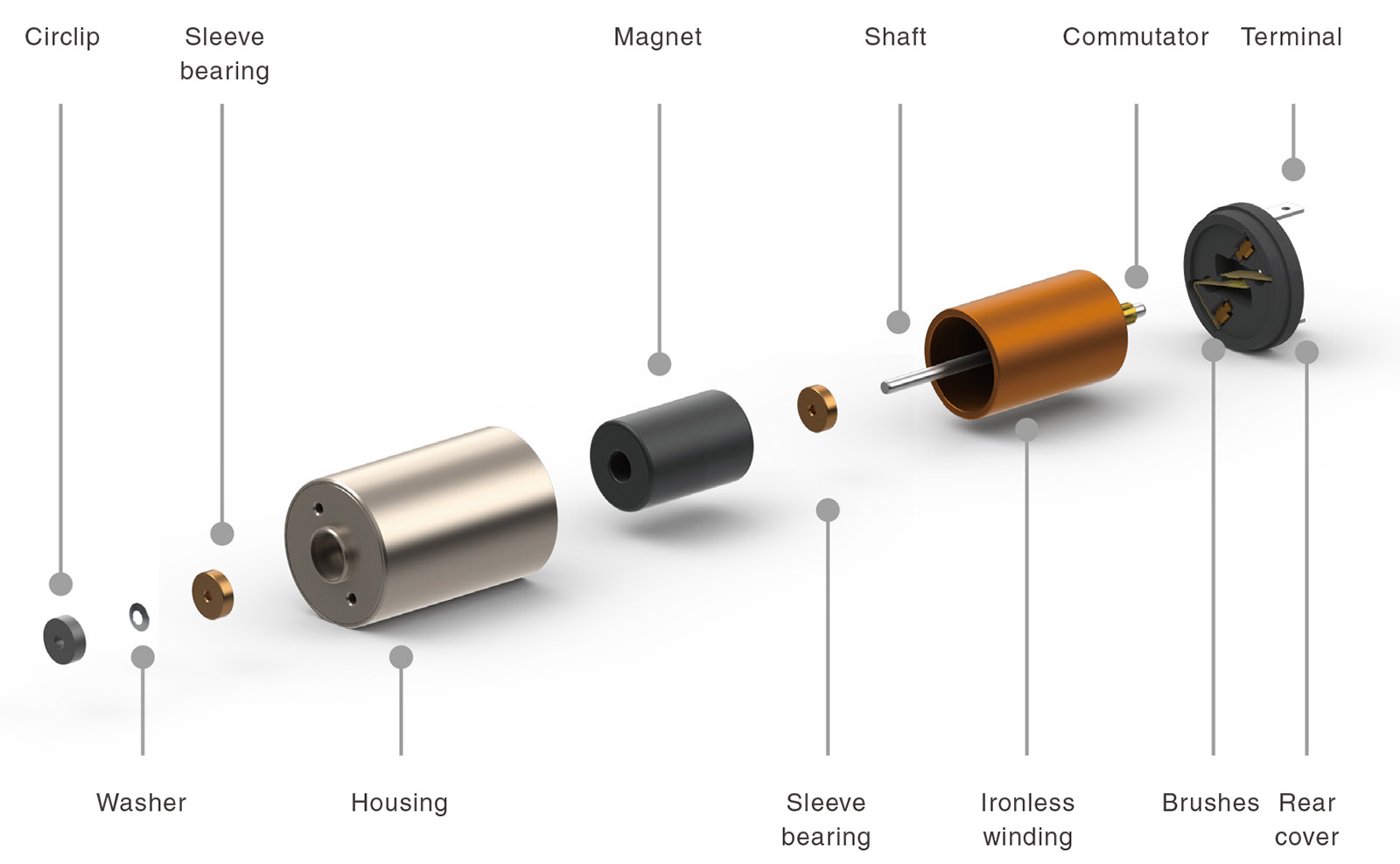
Сохторҳо
Саволҳои зиёд такрормешуда
A: Бале. Мо як истеҳсолкунанда ҳастем, ки аз соли 2011 ба Coreless DC Motor тахассус дорем.
A: Мо дастаи QC дорем, ки ба TQM мувофиқат мекунад, ҳар як қадам ба стандартҳо мувофиқ аст.
A: Одатан, MOQ = 100 дона. Аммо партияи хурди 3-5 дона қабул карда мешавад.
A: Намуна барои шумо дастрас аст. лутфан бо мо тамос гиред барои тафсилот. Пас аз он ки мо аз шумо ҳаққи намуна ситонем, лутфан худро осон ҳис кунед, вақте ки шумо фармоиши оммавӣ медиҳед, он баргардонида мешавад.
A: ба мо дархост фиристед → нархномаи моро гиред → тафсилоти гуфтушунид → тасдиқи намуна → имзои шартнома / пасандоз → истеҳсоли оммавӣ → омодагии бор → тавозун / таҳвил → ҳамкориҳои минбаъда.
A: Вақти таҳвил аз миқдори фармоиши шумо вобаста аст. одатан он 15-25 рӯзи корӣ мегирад.
A: Мо T / T-ро пешакӣ қабул мекунем. Инчунин мо барои гирифтани пул суратҳисоби гуногуни бонкӣ дорем, ба монанди доллари ИМА ё RMB ва ғайра.
A: Мо пардохтро тавассути T/T, PayPal қабул мекунем, роҳҳои дигари пардохт низ метавонанд қабул карда шаванд, Лутфан пеш аз пардохт бо дигар роҳҳои пардохт бо мо тамос гиред. Инчунин 30-50% пасандоз мавҷуд аст, пули тавозун бояд пеш аз интиқол пардохт карда шавад.
Моторҳои доимии бечӯткаи доимӣ нисбат ба муҳаррикҳои анъанавии DC бартариҳои зиёде пешниҳод мекунанд. Баъзе аз ин бартариҳо инҳоянд:
1. Самаранок
Мошинҳои бечӯткаи доимии ядроӣ мошинҳои самаранок мебошанд, зеро онҳо бе хасу мебошанд. Ин маънои онро дорад, ки онҳо барои ивазкунии механикӣ ба щеткаҳо такя намекунанд, соишро коҳиш медиҳанд ва эҳтиёҷоти нигоҳубини зуд-зудро бартараф мекунанд. Ин самаранокӣ муҳаррикҳои бечӯткаи DC-ро барои барномаҳои гуногун, ки иҷрои баланд ва масрафи ками энергияро талаб мекунанд, беҳтарин месозад.
2. Тарҳрезии паймон
Моторҳои Coreless BLDC паймонанд ва барои барномаҳои гуногун, аз ҷумла муҳаррикҳои хурд ва сабукро талаб мекунанд. Табиати сабуки моторҳо онҳоро барои барномаҳои марбут ба таҷҳизоти ба вазн ҳассос беҳтарин месозад. Ин тарҳи паймон як хусусияти калидӣ мебошад, ки онро барои соҳаҳое ба мисли аэрокосмос, тиббӣ ва робототехника мувофиқ мекунад.
3. Фаъолияти пасти садо
Муҳаррикҳои бечӯткаи DC барои кор бо ҳадди ақалл тарҳрезӣ шудаанд. Азбаски муҳаррик барои коммутатсионӣ щеткаҳоро истифода намебарад, вай нисбат ба муҳаррикҳои муқаррарӣ садои механикии камтар истеҳсол мекунад. Фаъолияти оромии муҳаррик онро барои як қатор барномаҳо интихоби олӣ месозад. Илова бар ин, муҳаррикҳои Coreless BLDC метавонанд бо суръати хеле баланд бидуни тавлиди садои аз ҳад зиёд кор кунанд ва онҳоро барои барномаҳои баландсуръат беҳтарин гардонанд.
4. Назорати дақиқи баланд
Моторҳои Coreless BLDC суръат ва назорати моменти аълоро таъмин мекунанд, ки онҳоро барои барномаҳое интихоб мекунанд, ки иҷрои дақиқи баландро талаб мекунанд. Ин назорати дақиқ тавассути истифодаи системаи назоратии пӯшида ба даст оварда мешавад, ки ба контроллери мотор фикру мулоҳиза медиҳад ва ба он имкон медиҳад, ки суръат ва моментро мувофиқи ниёзҳои барнома танзим кунад.
5. Умри дароз
Дар муқоиса бо муҳаррикҳои анъанавии DC, муҳаррикҳои бе ядрои доимии доимӣ умри дарозтар доранд. Набудани хасу дар як муҳаррики бе ядрои доимии доимӣ фарсудашавӣ ва ашкро вобаста ба коммутатсияи хасро кам мекунад. Илова бар ин, муҳаррикҳои доимии бе хас ба системаи назоратии пӯшида такя мекунанд ва нисбат ба муҳаррикҳои анъанавии доимӣ ба нокомӣ камтар майл доранд. Ин мӯҳлати хидматрасонии тӯлонӣ муҳаррикҳои бечӯткаи DC-ро интихоби аъло барои барномаҳои эътимоднокии баланд месозад.
Хулоса
Моторҳои Coreless BLDC нисбат ба муҳаррикҳои анъанавии DC бартариҳо ва бартариҳои олӣ пешниҳод мекунанд. Ин бартариҳо дорои самаранокии баланд, тарҳи паймон, кори ором, назорати дақиқи баланд ва мӯҳлати хизмати дароз мебошанд. Бо бартариҳои муҳаррикҳои бе ядрои доимии доимӣ, онҳо барои барномаҳои гуногун дар соҳаҳои гуногун, аз ҷумла робототехника, аэрокосмос, дастгоҳҳои тиббӣ ва автоматика ва ғайра беҳтаринанд.
-

XBD-1618 генофонди муҳаррики бечӯткаи доимии доимӣ...
-
XBD-2245 суръати баланди баромади бузурги моментҳои аъло ...
-
BLDC-2854 асбобҳои барқии гардиши баланд 28мм иваз ...
-
XBD-3564 Coreless Brushless Motor DC
-
XBD-1640 муҳаррики баландсуръати Slotless BLDC барои RC ...
-

1020 модели мини ларзиш муҳаррики coreless bldc